ابزارهای مهندسی برای درایوهای الکتریکی و کنترل موتور
ابزارهای کنترل موتور، شبیهسازیهای پایتون و پروژههای سختافزاری
توسط مسعود بخشی.
ابزارهای آنلاین رایگان مهندسی برای درایوهای ماشین الکتریکی: طراحی کنترلر PI جریان برای PMSM، IPMSM، EESM و موتورهای القایی، به همراه ماشینحسابهای الکترونیک قدرت، تحلیل حرارتی و دینامیک خودروی برقی.

طراحی کنترلر PI جریان در حوزه فرکانس برای درایوهای ماشین الکتریکی AC. شامل تحلیل پایداری، نمودار بود و تولید کد C برای میکروکنترلر. مناسب برای EESM، IPMSM و موتور القایی.
اجرای اپلیکیشن »
ماشینحساب مهندسی برای کنترل موتور، الکترونیک قدرت، فریمور امبدد، آنالیز حرارتی و محاسبات پیشرانش EV. شامل مدل گشتاور PMSM/IPMSM/EESM، SVPWM، طراحی کنترلر PI، مبدلهای باک و بوست، رفتار حرارتی و مقاومت جاده.
اجرای اپلیکیشن »آموزشهای عملی رزبری پای شامل GPIO، PWM، اندازهگیری جریان با حسگر ACS712 و ADC 32-بیتی ADS1263، کنترل حلقهبسته PI و MPC افق محدود روی درایور MOSFET و اسکوپ بلادرنگ UDP از برد کنترل F28388D.
آشنایی عملی با خروجی GPIO و سیگنالهای دیجیتال. یک LED وصل کنید، یک اسکریپت پایتون بنویسید و آن را مستقیماً از طریق پینهای GPIO کنترل کنید، نقطه شروع کلاسیک برنامهنویسی سختافزار.
مبتدی
مخزن GitHub »
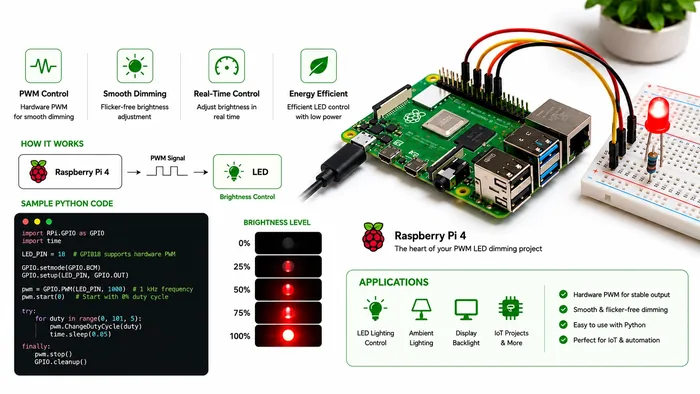
از مدولاسیون پهنای پالس (PWM) برای کنترل نرم روشنایی LED استفاده کنید. نمایشی عملی از اینکه چگونه PWM فاصله بین خروجیهای دیجیتال و کنترل شبهآنالوگ را پر میکند، که پایه اصلی درایو موتور و مبدلهای قدرت است.
مبتدی تا متوسط
مخزن GitHub »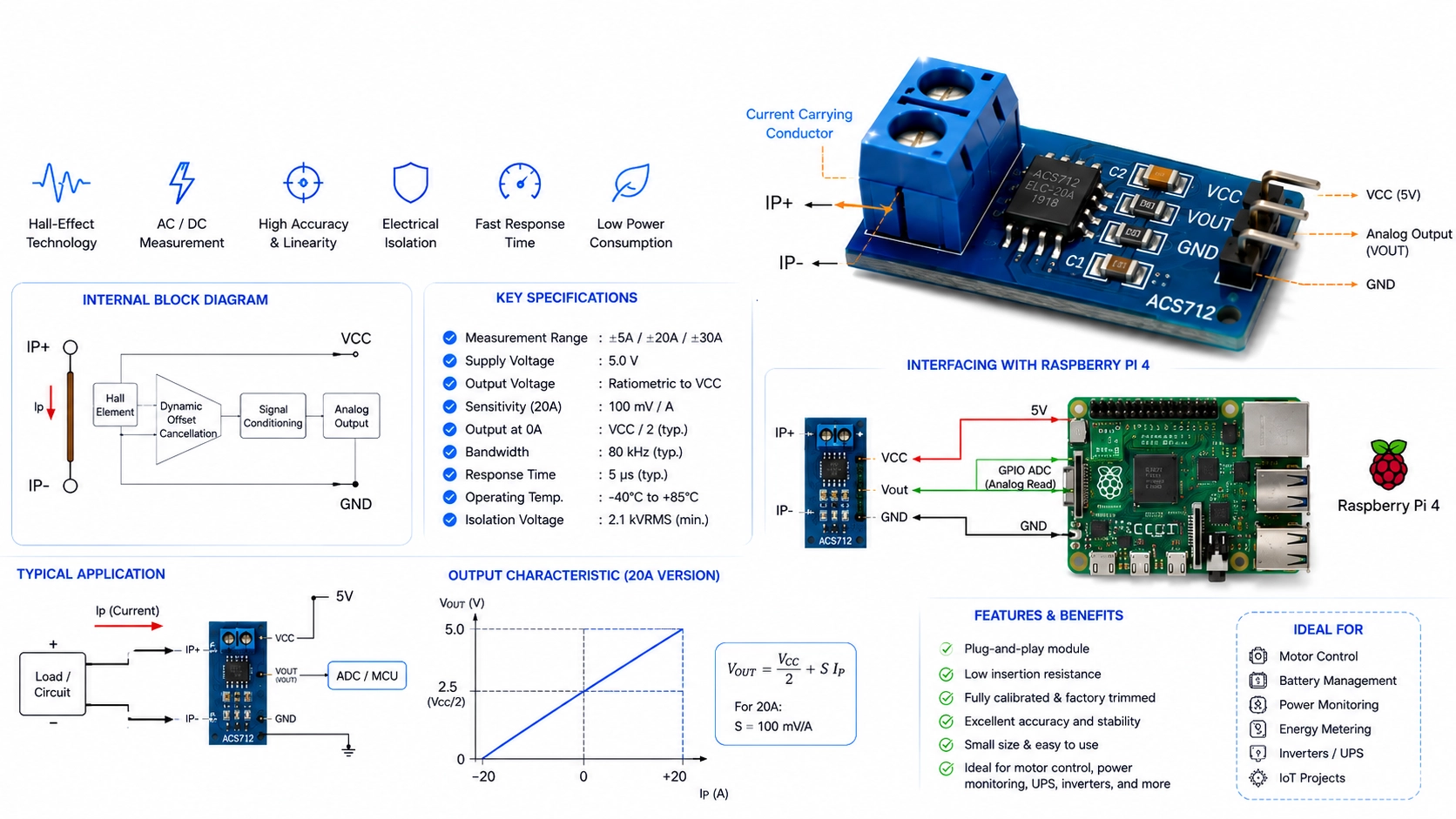
جریان DC/AC واقعی را با سنسور هالافکت ACS712 و کارت ADC ۳۲ بیتی ADS1263 از طریق SPI بخوانید. شامل اندازهگیری دیفرانسیلی، ارتباط SPI و تبدیل مقادیر خام ADC به واحدهای مهندسی.
متوسط
مخزن GitHub »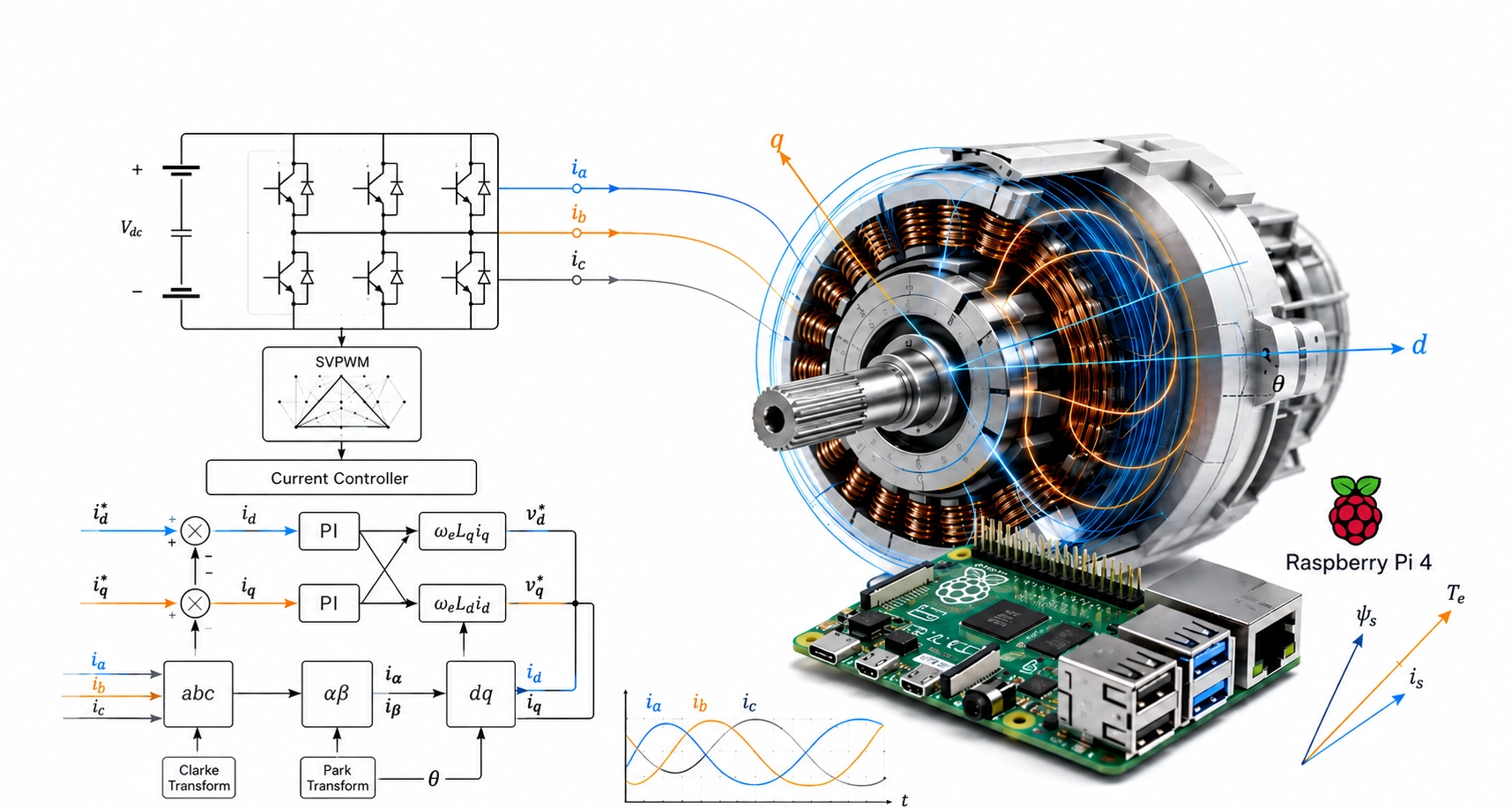
یک کنترلکننده PI جریان حلقهبسته کامل روی رزبری پای. ماژول MOSFET D4184 یک بار مقاومتی را سوئیچ میکند در حالی که ACS712 فیدبک جریان را فراهم میکند، نمایش عملی همان حلقه کنترلی که در الکترونیک قدرت صنعتی استفاده میشود.
متوسط تا پیشرفته
مخزن GitHub »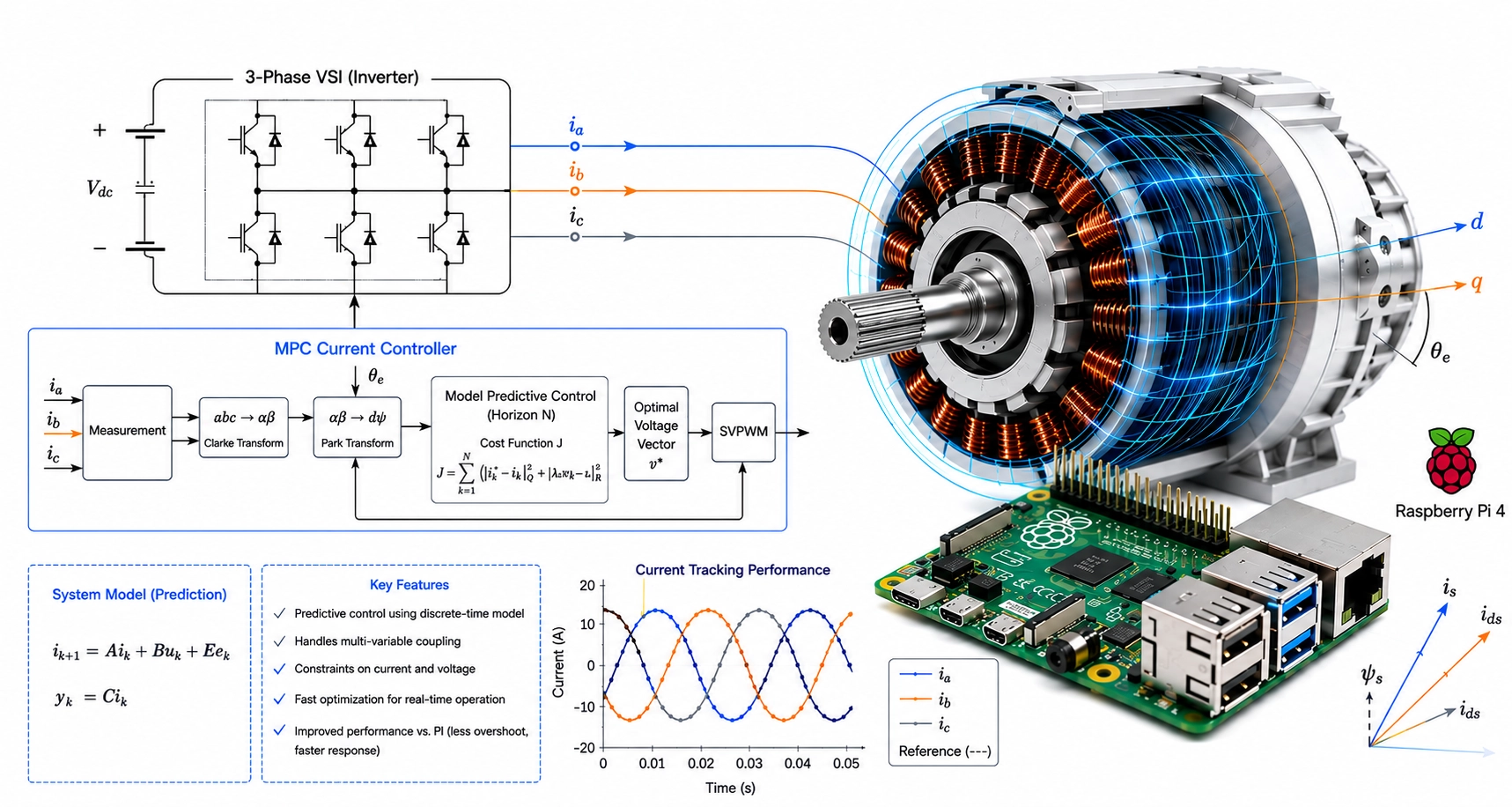
یک کنترلکننده پیشبین مدل (MPC) با افق محدود و قید، روی همان سختافزار MOSFET و ACS712 پروژه ۰۴. مدل پلنت را بهصورت آنلاین از یک تست پله شناسایی میکند، ماتریس بهره بهینه را از پیش محاسبه و بهینهسازی کامل با قید را در ~۴۸۰ هرتز اجرا میکند، بدون نیاز به تنظیم دستی.
پیشرفته
مخزن GitHub »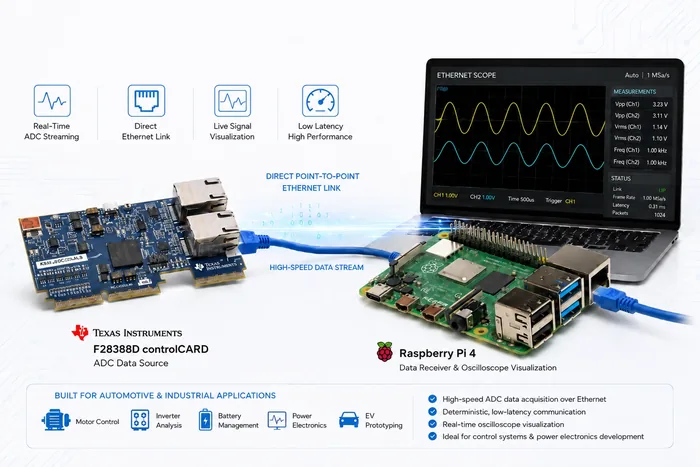
جریان ADC از برد کنترل F28388D را روی یک لینک اترنت نقطهبهنقطه دریافت میکند و آن را به صورت اسیلوسکوپ زنده نمایش میدهد. کانال ADCINA0 با نرخ ۱۰ کیلوهرتز نمونهبرداری میشود و در بستههای UDP ۵۰ نمونهای با نرخ ۲۰۰ بسته در ثانیه ارسال میگردد، با تلفات صفر در بازههای چنددقیقهای. سمت پای، یک شنونده UDP چندنخی و بافر حلقوی محدود دارد که از دو روش قابل دسترسی است: یک شنود CLI برای راهاندازی و عیبیابی، و داشبورد Streamlit و Plotly با شاخصهای زنده (جریان فعلی، میانگین، کمینه، بیشینه، RMS، نرخ بسته، درصد تلفات، زمان فعال بودن لینک)، دکمه توقف و خروجی CSV. تجزیهکننده بسته باینری تنها مرجع قالب سیم است و بایتبهبایت با فرستنده میانافزار همخوان نگه داشته میشود.
پیشرفته
مخزن GitHub »
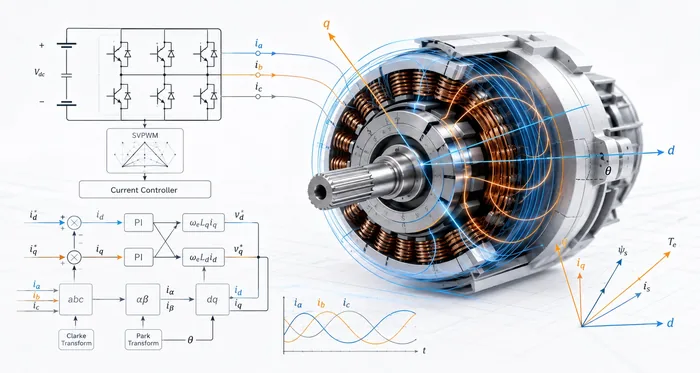
میزبان فرمان و مصورسازی سمت پای برای کنترلر جریان سنکرون F28388D روی اینورتر GaN ۴۸ ولت. پای بستههای فرمان باینری را با نرخ ۲۰۰ هرتز روی UDP ارسال میکند (مرجع Id/Iq، فرکانس الکتریکی، پارامترهای پلنت، enable/reset) و تلهمتری ۵ کیلوهرتزی را روی پورت دوم دریافت میکند. داشبورد چهارپنلی Streamlit و Plotly مرجع در برابر اندازهگیری Id/Iq، سه جریان فاز و ولتاژ باس DC را نمایش میدهد، با رمزگشای زنده پرچمهای اضافهجریان و watchdog. CRC-16-CCITT روی هر بسته. توضیحات کامل در README مخزن GitHub.
پیشرفته
مخزن GitHub »پروژههای فریمور روی DSP دوهستهای C28x مدل TI F28388D با برد اینورتر GaN ۴۸ ولت BOOSTXL-3PhGaNInv: GPIO، SVPWM سهفاز با نمونهبرداری ADC همگام، کنترلر PI جریان روی CLA، حفاظت سختافزاری اضافهجریان CMPSS، استریم اترنت lwIP و کنترل جریان سنکرون Field-Oriented روی UDP.
تأیید راهاندازی سختافزار برای controlCARD مدل TMDSCNCD28388D. LED داخلی D1 را از طریق GPIO31 با فرکانس ۱ هرتز چشمک میزند تا صحت درخت کلاک، زیرسیستم GPIO و اتصال دیباگ JTAG را پیش از اجرای هر فریمور کاربردی تأیید کند.
مبتدی
مخزن GitHub »
PWM بردار فضایی سهفاز را با فرکانس ۲۰ کیلوهرتز روی برد اینورتر BOOSTXL-3PHGANINV از طریق ماژولهای ePWM1/2/3 با dead-time تولید میکند. ADC در قله موج حامل PWM بهصورت همزمان فعال میشود تا جریان را در نقطه حداقل ریپل نمونهبرداری کند، در حالی که یک task اختصاصی CLA نتیجه را موازی با CPU اصلی میخواند. دادههای سکتور، سیکلهای کاری و ADC با نرخ ۱۰ هرتز از طریق UART ارسال میشوند.
متوسط تا پیشرفته
مخزن GitHub »
یک کنترلر جریان PI با فرکانس ۲۰ کیلوهرتز که بهطور کامل روی پردازنده همکار CLA در F28388D اجرا میشود و CPU اصلی C28x را برای تولید مرجع و تلهمتری سریال آزاد میگذارد. بهرهها بر اساس هدف پهنای باند (ωc = 2π×1000 rad/s) طراحی و در قالب فرم افزایشی گسستهسازی شدهاند که ضد اشباع ذاتی را بدون نیاز به منطق اضافی فراهم میکند. وظیفه CLA در کمتر از ۲ میکروثانیه اجرا میشود، توسط وقفه اتمام تبدیل ADC فعال میگردد و سیکل کاری جدید را در RAM پیام مشترک برای ISR ePWM مینویسد. یک اسکریپت Python دادههای تلهمتری سریال با نرخ ۱۰ هرتز را میخواند و پاسخ بود اندازهگیریشده را در مقابل منحنی تئوری حلقه باز رسم میکند.
پیشرفته
مخزن GitHub »
حفاظت سختافزاری اضافهجریان برای یک پایه اینورتر GaN با استفاده از CMPSS و Trip Zone های ePWM در F28388D. مقایسهگر جریان فاز را با آستانههای ±۸ آمپر کاملاً در سختافزار بررسی میکند و خروجیهای ePWM1 را در کمتر از ۱۰۰ نانوثانیه بدون دخالت CPU به صفر میرساند. یک پنجره بلانکینگ فیلتر دیجیتالی ۳۲ نمونهای نویز ناشی از ترانزیشنهای سوئیچینگ را حذف میکند. از هر دو حالت تریپ CBC و OST پشتیبانی میشود، یک ISR تریپ رویدادهای خطا را در بافر حلقوی ۱۶ تایی ذخیره میکند، و دادههای جریان و خطا با نرخ ۱۰ هرتز از طریق UART ارسال میشود. یک آزمون تزریق خطای نرمافزاری بهصورت خودکار در راهاندازی مسیر حفاظت را از ابتدا تا انتها تأیید میکند.
پیشرفته
مخزن GitHub »
میانافزار دوهستهای که F28388D را به یک frontend اسکوپ متصل به اترنت تبدیل میکند. هسته C28x CPU1 کانال ADCINA0 را با نرخ ۱۰ کیلوهرتز نمونهبرداری میکند (ePWM1 SOCA تریگر ADC-A SOC0)، هر نتیجه را به ولت تبدیل میکند و در یک حلقه شناور ۱۲۸ تایی در MSGRAM مشترک منتشر میسازد. هسته Cortex-M4 (CM) بسته lwIP NO_SYS را روی MAC اترنت تراشه با IP ثابت 192.168.10.10 بالا میآورد، حلقه را با SysTick یک میلیثانیهای میخواند و ۵۰ نمونه در هر بسته UDP، ۲۰۰ بسته در ثانیه ارسال میکند. CPU1 هسته CM را با Device_bootCM طبق ترتیب سختگیرانه فلش دوهستهای F2838x بوت میکند. سرتاسری با گیرنده رزبری پای، تلفات صفر در بازههای چنددقیقهای تأیید شده است.
پیشرفته
مخزن GitHub »
کنترلر جریان Field-Oriented Control برای یک بار سهفاز RL روی اینورتر GaN ۴۸ ولت BOOSTXL-3PhGaNInv، که از طریق اترنت توسط یک رزبری پای ۴ فرمان داده میشود. CPU1 پایپلاین ۲۰ کیلوهرتزی کلارک → پارک → PI دوگانه → پارک معکوس → SVPWM را داخل ISR رویداد EOC کانال ADCA1 اجرا میکند (در حدود ۴.۵ میکروثانیه از دوره سوئیچینگ ۵۰ میکروثانیه بسته میشود). بهرههای قطبصفر IMC، ضد اشباع به روش back-calculation، decoupling پیشخور بین دو محور و یک لایه حفاظت سختافزاری (اضافهجریان، اضافه/کاهش ولتاژ، watchdog اترنت). هسته Cortex-M4 lwIP NO_SYS را اجرا میکند و دو سوکت UDP را از طریق مِیلباکسهای MSGRAM به CPU1 پل میزند. CRC-16-CCITT روی هر بسته. توضیحات کامل در README مخزن GitHub.
پیشرفته
مخزن GitHub »انیمیشنهای پایتون و Matplotlib از مفاهیم پایه کنترل موتور: اصل Space Vector PWM، تبدیلهای کلارک و پارک، تفکیک جریان dq در PMSM، ناظر PLL برای back-EMF در سرعت پایین، حلقه کامل FOC با ناظر اغتشاش بار و مقایسه کنترلر PI بردار مختلط با PI کلاسیک.
انیمیشنی شفاف که نشان میدهد SVPWM چگونه الگوی سوئیچینگ ۷ بخشی اینورتر را از یک بردار ولتاژ مرجع دوار میسازد.
۰:۵۹
مشاهده » GitHub »
مرور تصویری تبدیلهای کلارک (αβ) و پارک (dq) که در قلب کنترل برداری موتور قرار دارند.
۰:۵۸
مشاهده » GitHub »
انیمیشن نحوه جداسازی جریانهای d و q در کنترل برداری موتور PMSM و اهمیت آن برای کنترل مستقل گشتاور و شار.
مشاهده » GitHub »
شبیهسازی نشان میدهد ناظر PLL چگونه زاویه Back-EMF را در سرعتهای نزدیک صفر دنبال میکند و خطای فاز در نزدیکی حالت سکون را برجسته میکند.
مشاهده » GitHub »تازههای مهندسی درایو الکتریکی، موتورهای کشش EV، اینورترهای SiC و GaN، معماریهای ۸۰۰ ولت، باتریهای حالت جامد و یادگیری ماشین برای کنترل موتور و پایش وضعیت.

BMW امروز از iX5 جدید بهعنوان شاسیبلند پرچمدار نسل Neue Klasse رونمایی کرد و برگه فنی درایو آن مثل خلاصهای از مسیر آینده پاورترینهای EV لوکس خوانده میشود. یک موتور سنکرون با تحریک جداگانه (Externally Excited Synchronous Motor) روی محور عقب و یک موتور القایی (Asynchronous / Induction Motor) روی محور جلو نشستهاند و در مجموع ۴۲۵ کیلووات و ۸۰۵ نیوتنمتر تولید میکنند و iX5 را در ۴.۶ ثانیه به ۱۰۰ کیلومتر بر ساعت میرسانند. انتخاب سنکرون با تحریک جداگانه برای محور عقب همان انتخابی است که در سطح بالای بازار تکرار میشود: جریان میدان روتور قابل تنظیم میماند، تلفات مغناطیسی در سفر آرام به نزدیک صفر میرسد و نیازی به آهنرباهای خاکی نادر (Rare-Earth Magnet) در صورتحساب مواد نیست. در سمت شارژ، معماری ۸۰۰ ولت اوج ۴۶۰ کیلووات DC را میپذیرد و باتری ۱۴۱ کیلوواتساعتی را از ۱۰ تا ۸۰ درصد در ۲۳ دقیقه پُر میکند. تولید از مرداد ماه در کارخانه Spartanburg آغاز میشود.
تیر ۱۴۰۵
بیشتر بخوانید »
مرسدس-بنز در کارخانه ماریاِنفِلدهٔ برلین تولید انبوه موتور الکتریکی آکسیال فلاکس (Axial Flux Motor) خود را کلید زد و این فناوری برای نخستین بار در خودروی تولیدی مرسدس-AMG GT کوپه چهاردر رونمایی میشود. خط تولید روی هفت نوار مونتاژ در حدود ۳۰٬۰۰۰ متر مربع گسترده شده و ۹۸ مرحله فرایندی دارد که ۶۵ مورد آن برای مرسدس و ۳۵ مورد در سطح جهانی برای نخستین بار اجرا میشود. در هندسه آکسیال فلاکس، مدار مغناطیسی به شکل دیسک فشرده میشود نه استوانه طویل؛ یعنی برای همان گشتاور، موتور بسیار کوتاهتر و سبکتر میشود. این همان زبان طراحی است که شرکت بریتانیایی YASA پس از تملک توسط مرسدس در ۲۰۲۱ به گروه آورد. آکسیال فلاکس پس از سالها محدود ماندن در هایپراسپرتهای کمتیراژ، حالا روی یک خط تولید واقعی نشسته است.
خرداد ۱۴۰۵
بیشتر بخوانید »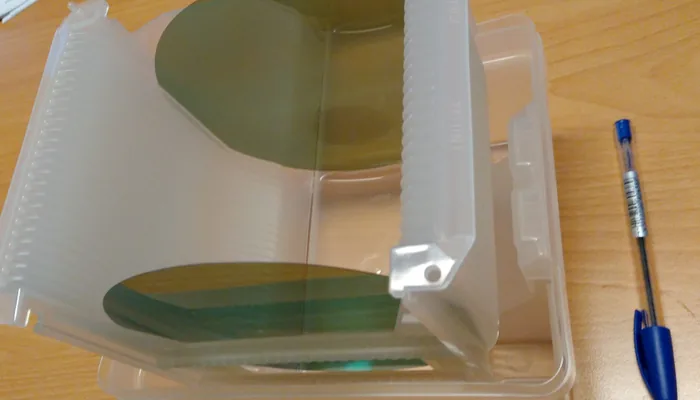
ولفاسپید نسل پنجم MOSFETهای کاربید سیلیکون (SiC MOSFET) خود را معرفی کرد و این پلتفرم را بهعنوان دارای کمترین مقاومت روشن مخصوص (Specific RDS(on)) در بازار برای کاربردهای خودرویی و صنعتی در دو سطح ولتاژ ۷۵۰ و ۱۲۰۰ ولت موقعیتیابی میکند. قطعه ۱۲۰۰ ولتی QEM50120-25D10 در دمای ۱۷۵ درجه سانتیگراد به RSP سطح تراشهای ۳.۴ میلیاهم در سانتیمتر مربع میرسد و توزیع RDS(on) بسیار باریک حدود مثبت و منفی ۱۸ درصد به طراح اجازه میدهد بدون قربانی کردن قابلیت اطمینان، حاشیه حرارتی اینورتر کششی را کم کند. دیود بدنه قطعه برای ۲۰۰ درجه سانتیگراد پیوسته و ۲۱۵ درجه عمر محدود تأیید شده و قطعات روی خط تولید ۲۰۰ میلیمتری ولفاسپید در حال ساختاند، یعنی این یک اعلان روی کاغذ نیست. انتظار میرود نسل ۵ در دور بعدی واحدهای درایو ۸۰۰ ولت تأمینکنندگان Tier 1 ظاهر شود.
خرداد ۱۴۰۵
بیشتر بخوانید »
تویوتا برنامه روشنی برای استفاده از باتریهای حالت جامد (Solid-State Battery) پُربازده در خودروهای برقی پیشرو اعلام کرد و دو هدف رسمی این طرح را افزایش برد و کاهش هزینه عنوان کرد. این اعلان در روزهای پس از انتشار سهم تویوتا را بیش از ۱۰ درصد بالاتر برد و تصویر شرکتی را که سالها به کندی در مسیر برقی شدن متهم میشد بازتعریف کرد. برای مهندس درایو، نکته جذاب در سمت سیستم است: سلولهای حالت جامد جریان شارژ و دشارژ بسیار بالاتری نسبت به لیتیوم-یون امروزی تحمل میکنند و این یعنی قیدهای حرارتی اینورتر و حلقه خنککاری شل میشوند و سراسر سایزینگ درایوترین حول پک تغییر میکند.
خرداد ۱۴۰۵
بیشتر بخوانید »
این هفته در نمایشگاه PCIM Europe 2026 در نورنبرگ، شرکت EPC نشان میدهد که پلتفرم جدید GaN نسل ۷ آن، درایوهای الکتریکی را به فراتر از موتورهای کشش خودرو میبرد. ePower Stage یکپارچه EPC33110 یک اینورتر سهفاز کامل برای موتور BLDC را در ابعادی فشرده میگنجاند که مستقیماً داخل موتور مفصل یک ربات انساننما (Humanoid Joint Motor) جای میگیرد و طرح مرجع EPC91122 درون دایرهای با قطر داخلی ۳۲ میلیمتر و قاب بیرونی ۵۵ میلیمتری قرار میگیرد. فرکانس سوئیچینگ بالاتر در ۱۰۰ ولت و ۳۵ آمپر یعنی حلقههای جریان (Current Loop) تنگتر، وزن فیلتر کمتر، و کنترل گشتاور مفصل که بالاخره با کاری که عضله بیولوژیک انجام میدهد قابل مقایسه میشود. رباتیک انساننما در حال تبدیل شدن به میدان رقابت بعدی الکترونیک قدرت است و GaN در مفصل برنده شده است.
خرداد ۱۴۰۵
بیشتر بخوانید »
خودروهای هیبرید پلاگین (Plug-in Hybrid / PHEV) معمولاً در حاشیه روایت EV میمانند، اما فشاری که بر اینورتر کششی وارد میکنند سختتر از چیزی است که تصور میشود. درایو باید سریع بیدار شود، در بازه گستردهای از بار بهصورت بهینه کار کند، و بودجه حرارتی را با موتور احتراقی به اشتراک بگذارد. پلتفرم PHEV جدید Schaeffler دقیقاً به همین دلیل به EliteSiC شرکت onsemi تکیه میکند: تلفات هدایت پایینتر برای طراحی فشرده و کارایی حرارتی بهتر، به همراه یک مرجع سیستمی ۱۵۰ کیلوواتی تمام-SiC که در PCIM Europe 2026 به نمایش گذاشته شد. یادآور این نکته که SiC هیبریدها را پیش از پایان فتح EVهای خالص تسخیر میکند.
خرداد ۱۴۰۵
بیشتر بخوانید »مهندس نرمافزار کنترل متخصص در درایوهای ماشین الکتریکی، سیستمهای اینورتر و نرمافزار کنترل خودرویی.
پلن۲۲ جایی است که ابزارهای مهندسی، شبیهسازیهای پایتون و پروژههای سختافزاری را در تقاطع تئوری کنترل، الکترونیک قدرت و سیستمهای EV به اشتراک میگذارم.
اینجا کنترلرهای جریان FOC که روی DSP خانواده TI C2000 اجرا میشوند، ابزارهای پایتون برای محاسبه ضرایب کنترلر PI از پارامترهای ماشین، و دموهای سختافزاری از مقدمات GPIO رزبری پای تا یک درایو سنکرون دوهستهای روی اترنت را پیدا میکنید.
برای پرسشها یا همکاری، یک پیام ارسال کنید یا فرم زیر را پر کنید:
info@plan22.net